

1. What is Stepper Motor?
As a special control motor, the stepper motor is an actuator that converts electrical pulses into angular displacement. When the stepper driver receives the pulse signal, it drives the stepper motor to rotate at a fixed angle in a set direction (called “step angle”). It rotates step by step with a fixed step angle. The number of pulses can be adjusted to achieve precise positioning of the angular displacement.
In addition, the pulse frequency can also be used to control the speed, acceleration and rotation of the motor, thereby achieving the purpose of speed regulation. If you change the order in which the windings are energized, the motor will reverse.

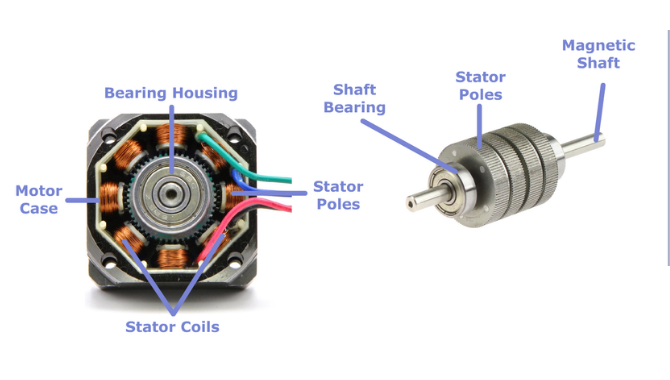
2. How a Stepper Motor Works
The stepper motor needs to be driven by a dedicated stepper motor driver, which consists of a pulse control unit, a power drive unit and a protection unit. The power drive unit amplifies the pulse generated by the pulse generation control unit and is directly coupled with the stepper motor, which belongs to the power interface between the stepper motor and the single-chip microcomputer.
The control command unit receives the pulse and direction signals, and the corresponding pulse generation control unit generates a set of corresponding pulses and then sends them to the stepper motor through the power drive unit. The stepper motor rotates the step angle in the corresponding direction.
Stepper motors have some important technical parameters, such as maximum static torque, starting frequency and operating frequency. Generally speaking, the smaller the step angle, the greater the maximum static torque of the motor, and the higher the starting frequency and operating frequency.
Therefore, this operating mode emphasizes subdivision drive technology. The method improves the rotational torque and resolution of the stepping motor and completely eliminates the low-frequency oscillation of the motor. So subdivision drives outperform other types of drives.
3. What is Servo Motors?
Servo motors use permanent magnets for their rotors. The driver controls the U/V/W three-phase electricity to form an electromagnetic field. The rotor rotates under the action of the magnetic field, and the encoder of the motor itself feeds back the signal to the driver. According to the feedback value and the target value, the driver adjusts the rotation angle of the rotor.
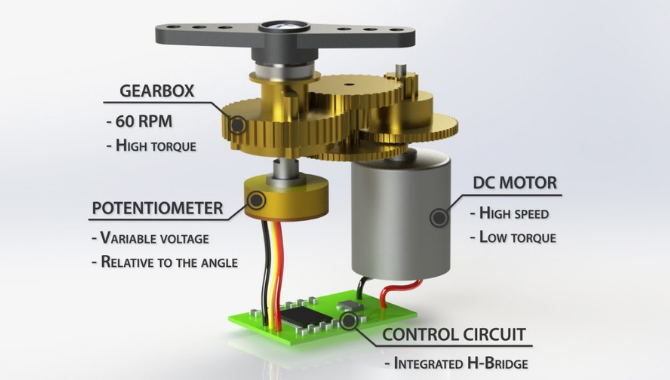
4. How Servo Motors Work
Servo motor, also known as an executive motor. In the automatic control system, the servo motor is used as the actuator to convert the received electrical signal into the angular displacement or angular velocity on the motor shaft and then output.
AC and DC servo motors can be distinguished. When the servo motor receives a pulse, it rotates an angle corresponding to the pulse to achieve displacement because:
The servo motor itself has the function of sending out pulses, so each rotation angle of the servo motor will send out a corresponding number of pulses, forming a closed-loop together with the pulses received by the servo motor. The system will know how many pulses it sends to the servo, and how many pulses it receives.
This allows precise control of the motor for precise positioning. AC servo motors are superior to DC servo motors in performance. The AC servo motor adopts sine wave control, with a small torque ripple and large capacity.
The DC servo motor adopts trapezoidal wave control, which is relatively poor. Brushless servo motors in DC servo motors have better performance than brushed servo motors.
Servo motors use permanent magnets for their rotors. The actuator controls the U/V/W three-phase electricity to form an electromagnetic field for the rotor to rotate. At the same time, the encoder of the motor itself feeds back the signal to the drive. According to the feedback value and the target value, the driver adjusts the rotation angle of the rotor.
1) Brush DC Servo Motor Drive:
The working principle of the motor is the same as that of an ordinary DC motor. The actuator is a three-ring structure, which is a current loop, a speed loop and a position loop from the inside to the outside.
The armature voltage of the motor is determined by the output of the current loop. The current loop’s inputs are the PID output of speed loop, PID output of position loop, and given input of position loop. The control chart is shown above.
2) Brushless DC Servo Motor Drive:
The power supply is DC, which is converted into U/V/W AC power by an internal three-phase inverter. The drive also adopts a three-loop control structure (current loop, speed loop, position loop), and the drive control principle is the same as above.
3) AC Servo Motor Drive:
Can be divided into two modules: power panel and control panel with independent functions. The control panel outputs the PWM signal through the corresponding algorithm as the drive signal of the drive circuit to change the output power of the inverter, the purpose is to control a three-phase permanent magnet synchronous AC servo motor.
The power drive unit first rectifies the input three-phase electric energy or mains power through the three-phase full-bridge rectifier circuit to obtain the corresponding direct current.
The three-phase permanent magnet synchronous AC servo motor is driven by the commutator of the three-phase sine wave PWM voltage-type inverter through a good three-phase or mains rectifier. It’s just a simple AC-DC-AC converter process.
The control unit is the core of the whole AC servo system, which realizes the position control, speed control, torque control and current control of the system.
5. Performance Comparison of servo motors and stepper motors
Here are some common performance comparisons of servo motors and stepper motors.
1) Control precision
The more phrases and beats a stepper motor has, the more accurate it is. Servo motor from its own encoder block. The larger the scale of the encoder, the higher the accuracy.
2) Low-frequency characteristics
Stepper motors are prone to low-frequency vibration at low speeds. When working at low speed, damping technology or subdivision technology is usually used to overcome low-frequency vibration. The servo motor runs very smoothly and does not vibrate even at low speeds.
3) Torque-frequency features
The output torque of the stepper motor decreases with the increase of the speed and decreases sharply at high speed. Servo motor rated speed constant torque output, rated speed constant power output.
4) Overload capacity
Stepper motors do not have overload capacity, and servo motors have strong overload capacity.
5) Operational performance
Stepper motors are open-loop controlled. If the starting frequency is too high or the load is too large, it is easy to lose steps or stop rotating. When the speed is too high, overshooting is easy.
The AC servo drive system adopts closed-loop control. The driver of the servo motor can directly sample the feedback signal of the motor encoder. Forms an inner positioning ring and a speed ring. Generally, the stepper motor will not lose step or overshoot, so the control performance is more reliable.
6) Speed responsive performance
It takes hundreds of milliseconds for a stepper motor to accelerate from standstill to operating speed. The AC servo system has good acceleration performance, generally only a few milliseconds, and can be used in control occasions that require rapid start and stop.
6. How do servo motors and stepper motors work differently?
Stepper motors are also called pulse motors or stepper motors. It is essentially an open-loop system, or rather, there is no built-in encoder feedback from the motor to its driver.
The driver or motor driver refers to the internal component or the device that drives and controls the motor. The stepping motor responds to the pulse signal generated by the PLC and inputs it to the motor driver to make the rotating shaft of the motor rotate, which reflects the complete working cycle of the stepping motor.
The angle of rotation of the motor is fixed. Assuming that 1 pulse represents 0.72°, a rotation of 90° is 150 pulses. The speed of a stepper motor is proportional to the pulse frequency. The higher the frequency, the faster the stepper motor works.
However, the way a servo motor works are called a “closed-loop system”. Unlike stepper motors, servo motors are combined with embedded encoders to feed current back to the servo drive. The pulse signal generated by the PLC is transmitted to the servo driver through the direction signal, and the servo driver provides it to the motor so that the motor starts to rotate. The motor will also in turn give the servo drive running feedback with the encoder cable, we can control the cable in the PLC.
7. Pros and Cons
Stepper motors are usually an economical choice because of their lower cost relative to servo motors, but this also means that stepper motors are not as functional and efficient as servo motors. But that doesn’t necessarily mean that servo motors are always a better choice than stepper motors.
Generally, servo motors are used to pay high standard specifications or specific needs in machine construction and design, but in specific parts when such high standards have not been required the use of servo motors will be a redundant and “lean” option stepper motors. Below is a brief comparison of the various specifications of stepper motors and servo motors.
| # | Specifications | Stepper Motor | Servo Motor |
| 01 | System function | Open-loop system (no position feedback or encoder) | Closed-loop system (position feedback or encoder present) |
| 02 | What is the cost of stepper & servo motors? | Cost-effective | Very expensive |
| 03 | How fast can stepper & servo motors turn? | Low Speed (1500 RPM maximum) | High Speed (5000 RPM maximum) |
| 04 | Torque/ speed control odf | No torque-control or speed-control mode | torque-control or speed-control mode |
| 05 | Are stepper & servo motors AC or DC? | DC current use | AC current use |
| 06 | Torque of stepper & servo motor | High torque in low speed | High torque in high speed |
| 07 | Requirement | No tuning required | tuning required |
| 08 | Consuming power | Consumes less power | Consumes more power |
| 09 | Function | Simple and easier for commissioning | Complex for commissioning |
| 10 | Size | Maximum 750W motor size available | 50W to 15KW motor size available |
8. Servo Motors for Packaging Machinery
Servo motors have been widely used in packaging machinery for their precision, excellent performance and complex application environment. Almost all machines in Jochamp’s catalogue are equipped with servos. This is in line with our commitment to quality. We strive to provide our customers with high standard machines that are reliable, efficient, highly accurate and completely trustworthy.